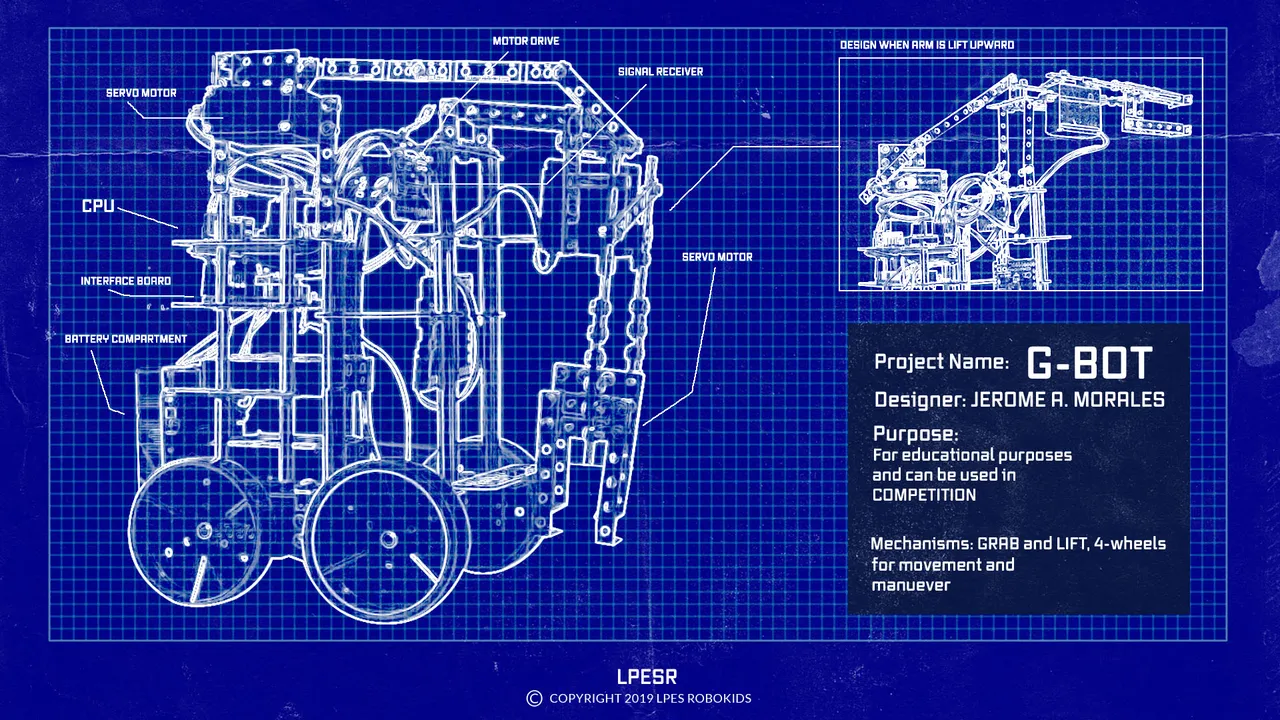
This ROBOT is my original design. It is powered by 12 pieces of AA batteries and it is composed of the following major parts:
- 4 motors operating at 100 rpm
- 2 servo motors
- 1 programmable CPU in a circuit board
- 1 interface board
- 1 receiver circuit board
- 1 motor drive a circuit board to allow additional motors to be installed
The illustration above shows the location of the major components. During the design process, my objective was to able to come up with an effective grabbing mechanism that will be able to hold cube-shaped objects.

There are lots of robotics systems with grab mechanisms and usually done by clamping devices. This is really effective only for specific object shapes but ineffective for other objects. This is one of the main reasons that some robotic arms available for purchase are good only to some extent, but I think counting a few more years, the robotics industry will be able to mass produce robotics systems with a very flexible grab and lift mechanisms that can be used for general purposes and let me just digress a little bit more by saying that one of my favorite robots with grab and lift mechanism is the robot arm being operated by JARVIS in IRONMAN movies just like what you see in the screenshot below.

I choose this screenshot above because the robot arm actually saved my idol Tony Stark from dying by handing over the ARC REACTOR. Yep, it's a robotic arm with almost perfect grab and lift mechanism, you can see its fullness in this next screenshot that I also took in my PC. The robotic arm is actually holding a fire extinguisher and the other one is a camera.

Alright going back to my story. I named the robot G-BOT in which the G stands for Giraffe, so it's giraffe inspired robot because when it lifts the arm, the robot kinda looks alike with a giraffe for me. It was practical for me to design support beams that will hold the arm up top, because I created this robot, in order to meet the specific requirements of a particular robot competition, where the robot must have the ability to put a cube in against an approximately 6-inch tall basket.

Photo: The robot in the picture is not yet the G-Bot but this was also one of my prototypes.
You will notice baskets were labeled one indicates ANIMALS, the next one FRUITS and the green basket indicates VEGETABLES. The idea was to design a robot that will pick up animals, fruits, and vegetables into their corresponding container. The robot is in a maze, so the one who can accomplish this task faster wins. You will see in the picture below that boxes are scattered throughout the maze in which another challenge is to devise a strategy in which you have to decide which box first to pick up based on their location, and also in consideration of the position of the baskets and the obstacles along the way.

Photo: This is my team in the picture, a parent of one of my students took this shot from her phone while watching the competition
The first challenge was to build and program a robot that can grab and lift an object effectively. Failed grab attempts will waste seconds for the win. Second, is to design the robot to be faster than others. Third, an efficient program specifically for the robot movement as well as to operate the grabber and the arm. Lastly, the driving skill needed for the one who will operate the robot, perfect build and program will be useless if the operator doesn't have good driving skills and the driver's ability to improvise when the robot malfunctions. I probably typed enough written information and watching the robot in action will certainly be a bit more interesting...
The video also contains information about what happened during the competition and without further ado...
Let me show you a video that I created for this ROBOT

Thanks for reading. Peace out.